H-brygga
Koncept
Vill vi snurra medurs slår vi till switch S1 och S4 och vill vi snurra moturs switch S3 och S2. Notera att uppkopplingen nedan liknar ett "H".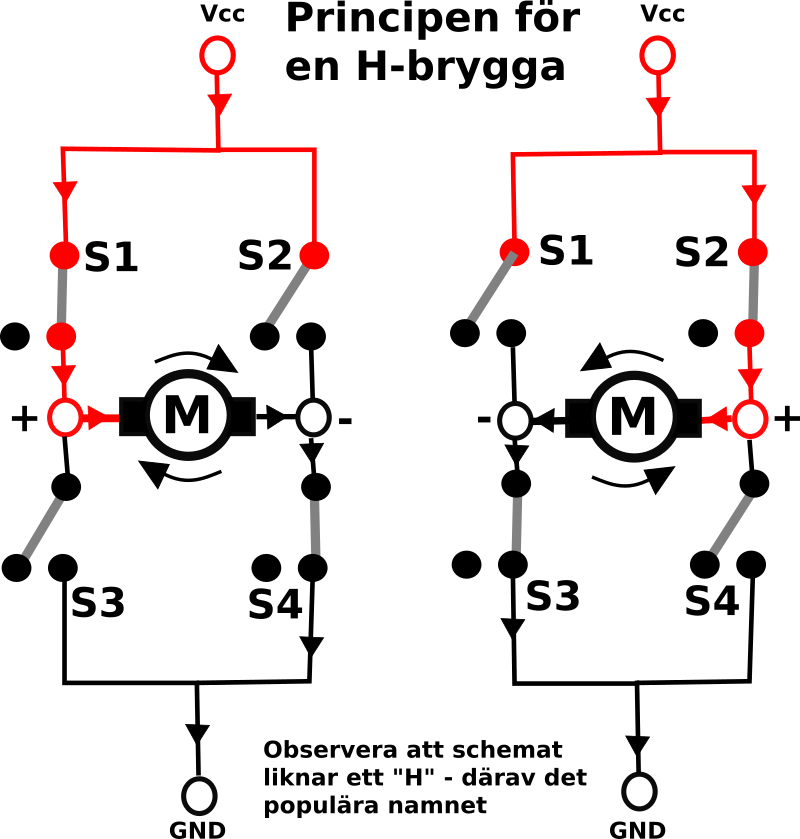
S1-S4 är typiskt effekttransistorer av något slag, t.ex. mosfet eller IGBT. En IGBT kan hantera väldigt höga effekter.
L298
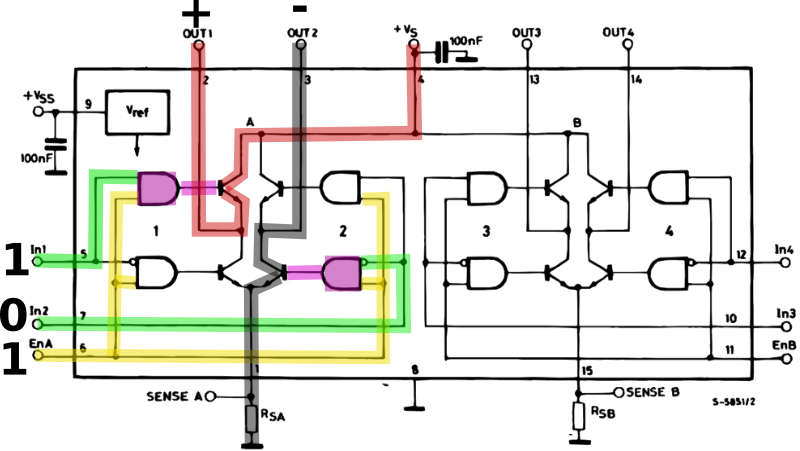
Exempel på användbar krets här är L298. Som synes nedan består kretsen av dubbla H-bryggor, alltså 2 uppsättningar H-bryggor.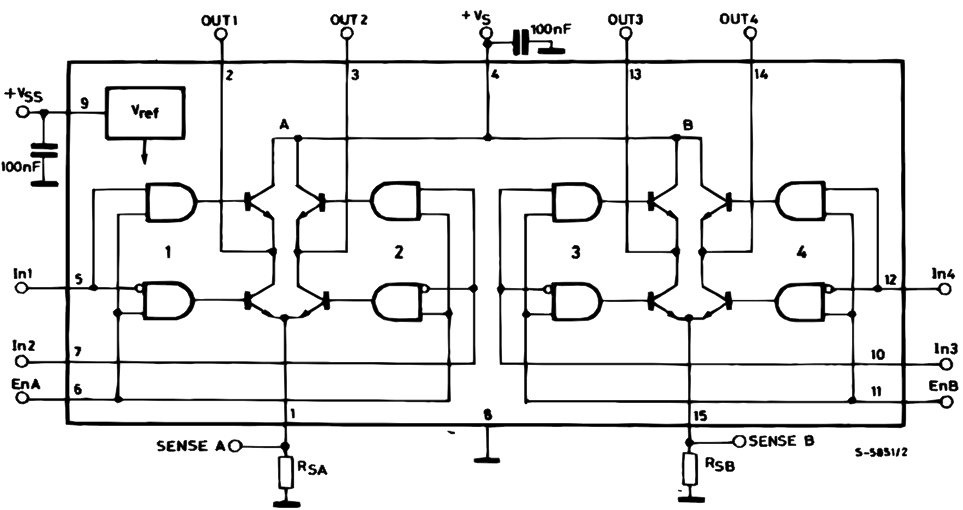
Säg att vi kör in digitala låga signaler på In1 och In2 samt aktiverar bryggan (enA=hög). Båda utgångar blir låga. Observera att transistorerna fungerar som switchar. En hög signal på basen får dem att leda och en låg får dem att "flyta fritt". Observera att AND -kretsen (för de låga transistorerna) har en inverterare på ingången, så en låg ingång blir hög.
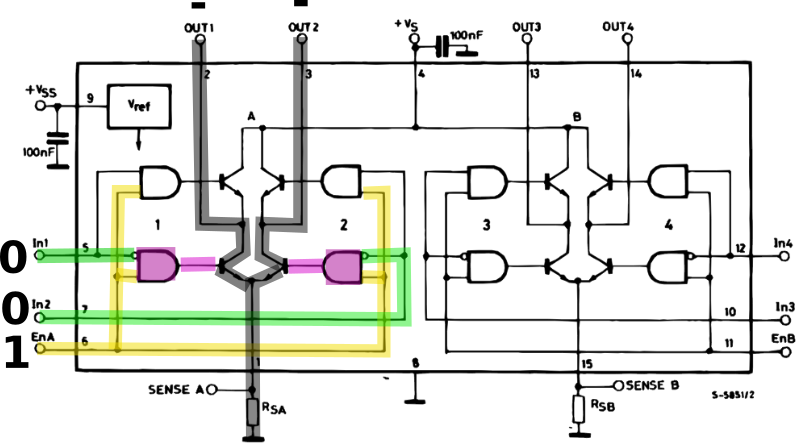
Sätter vi in1 hög kommer 1:an höga sida bli aktiv vilket gör att out1 blir hög. in2 är fortfarande noll och dess utgång blir låg. Dvs out1 blir + och out2 blir negativ. Strömmen flyter från out1 till out2.
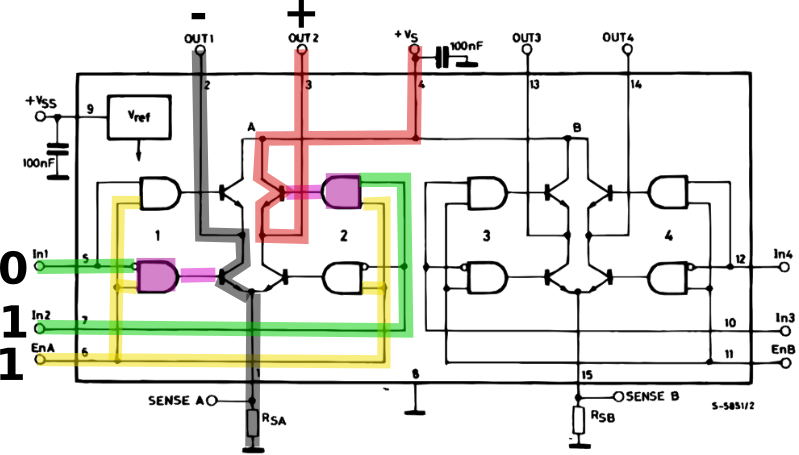
Det omvända inträffar om vi sätter in1 låg och in2 hög. Har du svårt att begripa ovan kanske du missat att den vissa AND -grindar har en inverterare på ena ingången (liten ring). Detta får effekten att en hög eller låg signal aktiverar enbart den ena av dem.
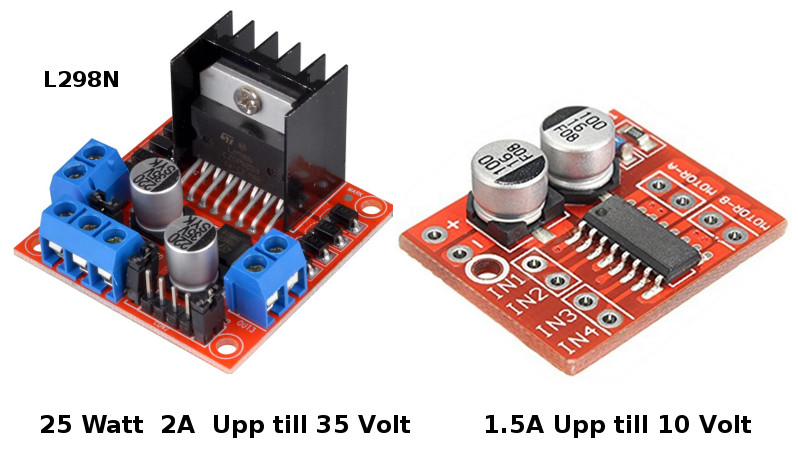
L298N på ett kretskort
En praktiskt användbar billig dubbel H-brygga till hobbyprojekt är t.ex. nedanstående som bygger på L298N, med skruvplintar för spänningen till motorer samt stiftpinnar till mikrokontrollern. Den klarar upp till 25 watt vilket är mer än väl för mindre projekt. Det finns 2 praktiska byglingar så att man kan sätta enA och enB till konstant höga, då de oftast inte behövs om man t.ex. skall driva en motor.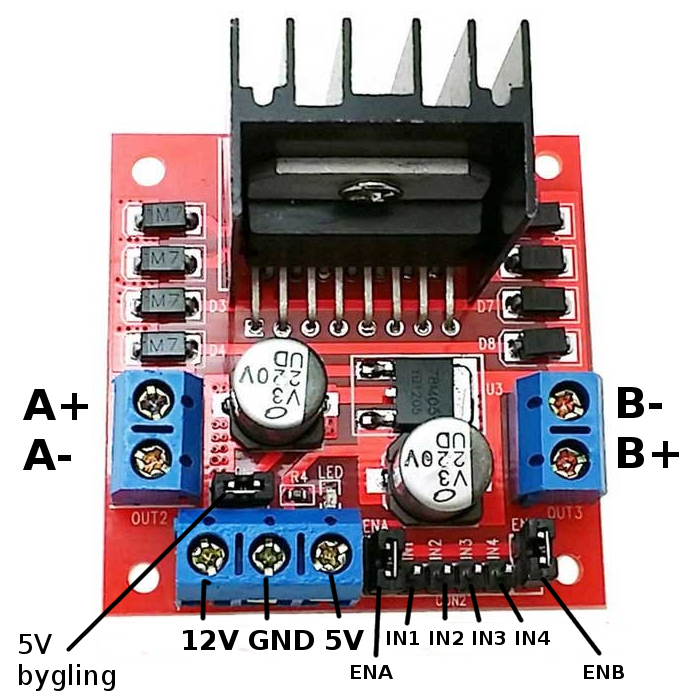
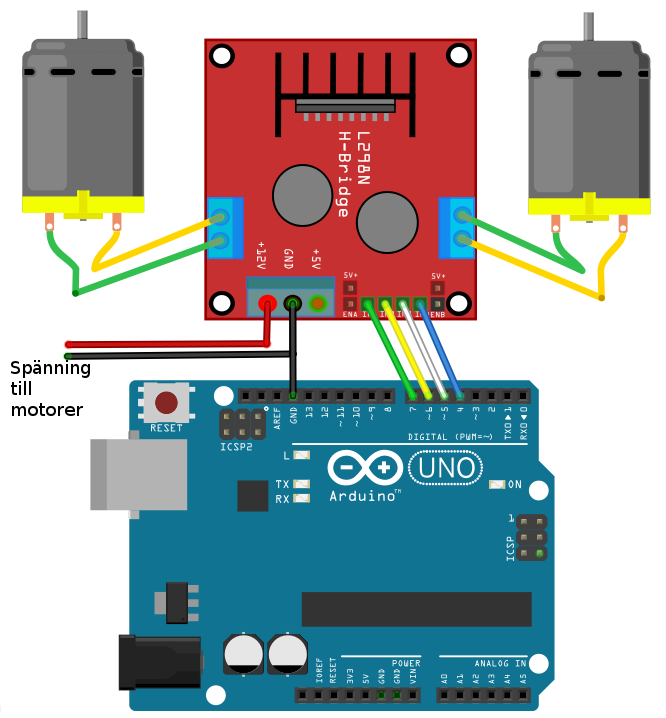
Typisk uppkoppling med L298N
En typisk uppkoppling med kretsen L298N nedan. Eftersom kretsen innehåller dubbla H-bryggor kan vi alltså driva 2 motorer vilket passar de flesta robotprojekt som handen i handsken. På båda dessa motorer kan vi reglera varvtalsriktning (fram/back).Observera att vi har 2 olika spänningar här. Dels den som driver mikrokontrollern (arduino i detta fall) vilken är på 5 volt och dels del spänningen som driver motorerna som kanske är på 12 volt. Det viktiga är att de delar gemensam grund (minus) annars kommer konstiga fel uppstå. Styrsignalerna går eventuellt fram ändå, delvis, motorna går på halvfart kanske bara åt ena hållet osv. Så se till att minus blir gemensam.
Användning med kodexempel:
Varvtalsreglera dcmotor med h-brygga och pulsbreddsmodulering.
Driva en stegmotor med varvtalsreglering med h-brygga.