Robotens ögon (huvud)
Övre del
I vårt lilla robotprojekt som definitivt går framåt dock med snigelfart hör ögonen till den övre tredjedelen. Se skissen nedan.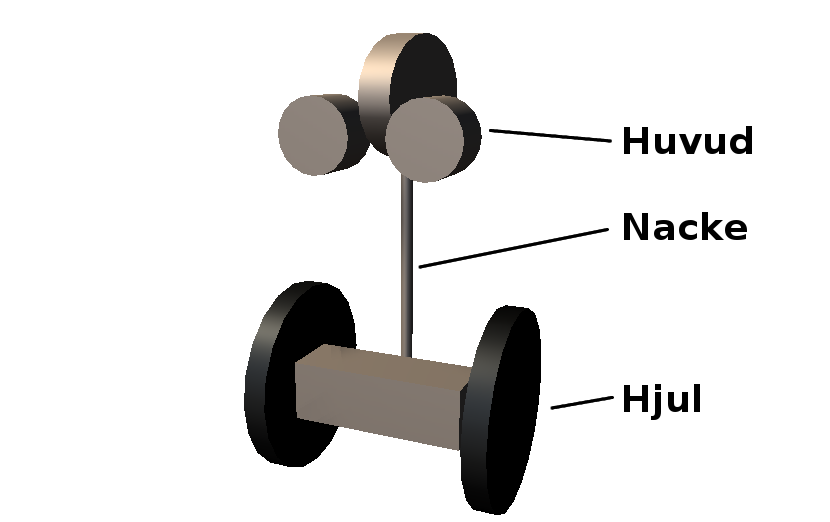
Ögonen
Forskning på människa-robot -interaktion har visat att det är en otroligt viktig detalj att roboten blinkar med ögonen, för att uppfattas som närvarande och levande. Och för att kunna blinka med ögonen behöver man ögonlock! Med ögonlock ökar också möjligheten att uttrycka sig. Nu behöver man kanske inte både ett undre och övre ögonlock här, men med båda dessa blir det enklare rama in ögat. Sedan är det en option hur man väljer att reglera det undre ögonlocket.Delar
I föräldrarnas finskåp finns praktiska grejjer. T.ex. sådana här supkoppar, som ändå ingen använder (fast fråga för säkerhets skull). Om man sätter sågen i dessa och delar dem på hälften blir det perfekta ögonlock.
Andra "prydnadsgrejjer" i våra hem är t.ex. sådana här gräddkoppar, som kan fungera utmärkt som ögonhålor att montera ögonlocken i.

Ögonhålan
Jag har helt sonika delat gräddkannan på mitten med en såg. Diametern blev inte riktigt vad jag hoppades på, eller rättare sagt p.g.a. "tippen" innesluter inte gräddkannan hela ögat, så jag gjort en liten lagningspatch. Det gör ingenting. Lite metalliska ärr ger bara roboten lite karraktär.Ögonlocken
Ögonlocken är är skapde med de itusågade supkopparna, dessutom har jag borrat hål så att en led kring vilket ögonlocket kan rotera går att montera. Ögonlocken är sedan individuellt styrbara med servon vilket bör ge ett brett spektra av möjliga uttryck. Utmaningen här är att få mekaniken så smidig att det går att reglera dessa ögonlock snabbt och exakt. Det är där själva känslan kommer sitta när maskinen går live.Ögonvitan
Principen för ögat är alltså att placera kamera -modulen bakom en vit sfär som i sin tur kan röra sig bakom ögonlocken som i sin tur innesluts av själva ögat.
För ögonvitan behövs någonting med en mindre diameter än ovanstående ögonlock. Grädd-kannan har en innerdiameter på ca 8 cm. Sup-kopparna har en diameter på ca 7 cm. En plastboll som har en diameter på ca 6 cm är sådana där plastbollar man hittar i godismaskiner som brukar stå uppställda i butiksentrer. Dessa plastbollar särar man i två halvor och sedan borrar man ett hål i mitten och spraymålar dem med förbättringsfärg för vitvaror som finns på t.ex. biltema. Jag har därefter, med silikon, limmat fast en gummiring i detta hål.

Ögonhållaren
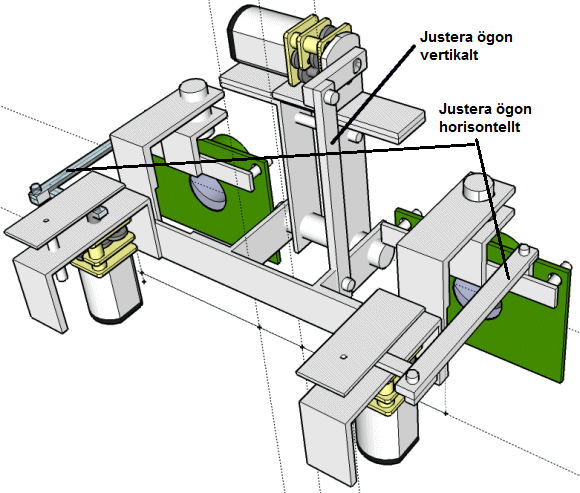
Rent mekaniskt sitter båda ögon i en mekanism som bygger på nedanstående princip (skiss från min äldre robot)
Det vill säga; i höjdled (vertikalt) rör sig båda ögon parallellt men i sidled (horisontellt) rör sig ögonen individuellt. En mekanisk förenkling som är möjlig tack vare att ögonen fungerar på detta vis även på människor och andra djur. En annan skiss som illustrerar principen för att styra ögonvitorna i sidled resp. höjdled nedan. Skissen är från en tidigare version av roboten men principen är samma.
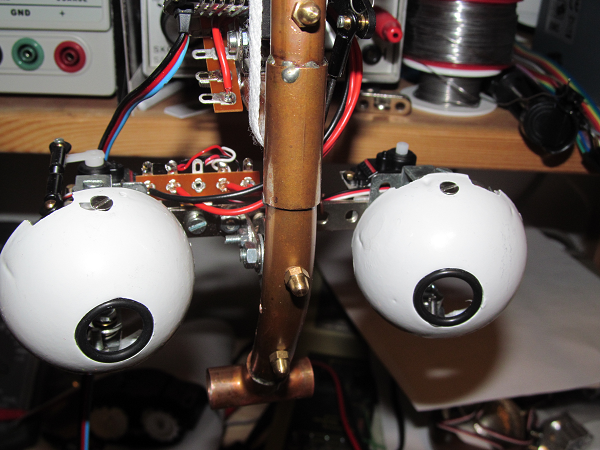
Detta ger en helt glappfri enkel överföring av rörelsen från servot till ögat. Eventuella mekaniska fel i sådana här länkarmar kan åtgärdas i mjukvaran med Freudensteins ekvation. Ögonvitorna monterade i hållaren nedan. Det sitter inga kameramoduler i ögonvitorna ännu. Men servon som styr ögonvitorna i horisontal-led är monterade med kablar.
Bakfrån ser det ut som nedan. Poängen med lödstöden är följande. Ögonhållaren kommer röra sig upp och ner i takt med att ögonen rör på sig. Det betyder att servots tunna kablar - som inte alls är gjorda för ständig rörelse - helt enkelt skulle gå sönder. Så därför har jag gjort en "brygga" från hållaren till huvudet med mjuka, lite tjockare, "labbkablar", som skall klara av sådan här rörelse. Hållaren är delvis ihopskruvad med mekanodelar men själva hållarna/fästet för servona är egentillverkat i aluminium.
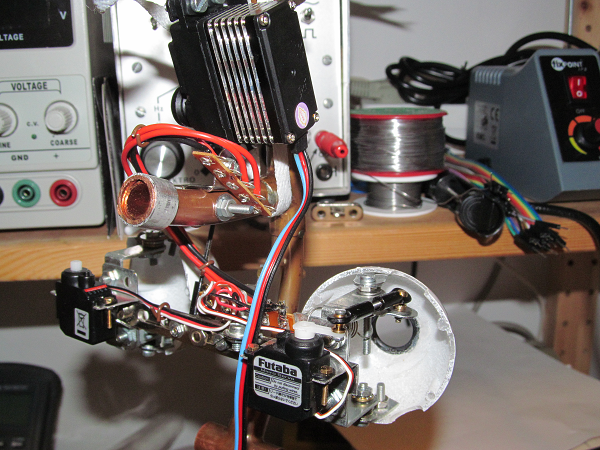
En kritisk detalj är lagerbocken som inte syns på ovanstående bilder men däremot på bilden här nedan...
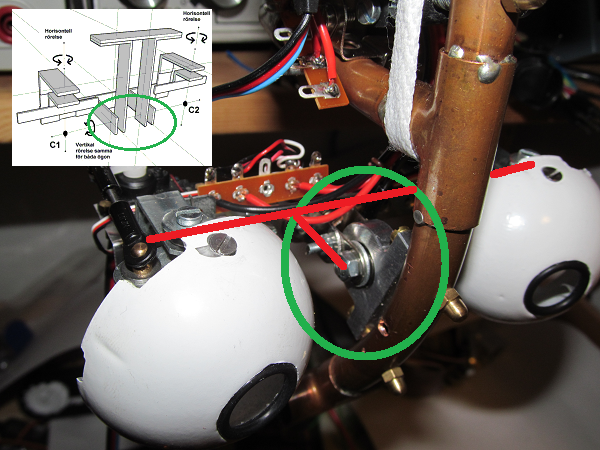
Den har ett kullager i mitten som rullar väldigt exakt och lätt. Jag provade många olika varianter innan jag hittade denna lösning som är både stark, stabil och skapar en exakt glappfri rörelse. Själva huvudets stomme är gjord med "varmglödgade" koppar-rör. Sådana man använder för att dra varm och kallvatten till kök eller badrum. Men lite kraft kan man böja dessa till olika former och koppla ihop dem med diverse adaptrar som finns i överflöd hos byggvaruhus.
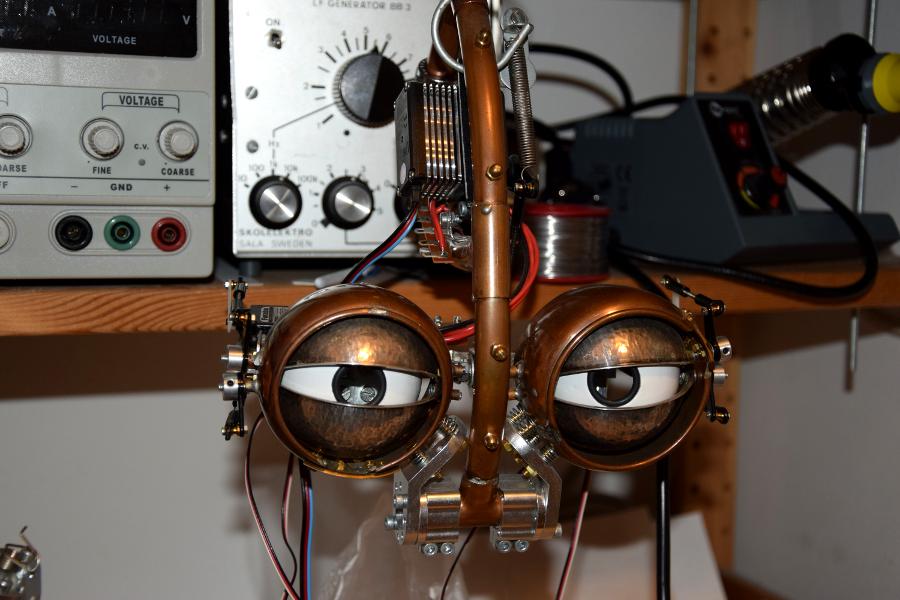
Ihopmonterat
Blev det som nedan. Ögonen kan alltså röra sig i ögonhålorna och övre och undre ögonlock är justerbara. Totalt 7 servon styr de rörliga delarna.