Slakta hoverboard
Varning: Prova inte detta där hemma om du inte har tillräckliga kunskaper.Motorer och batterier av hög kvalite
Om man skall köpa vettiga hjul till ett robotprojekt och en bra batteripack så kostar detta hur många tusen kronor som helst och man får bara skräp. Bara ett lithium -paket på 150 watt kan kosta en förmögenhet. Hjul med motorer kan kosta flera tusen kronor och då är det ändå inte vettiga saker som går att köra någon längre tid utan att motorn går sönder.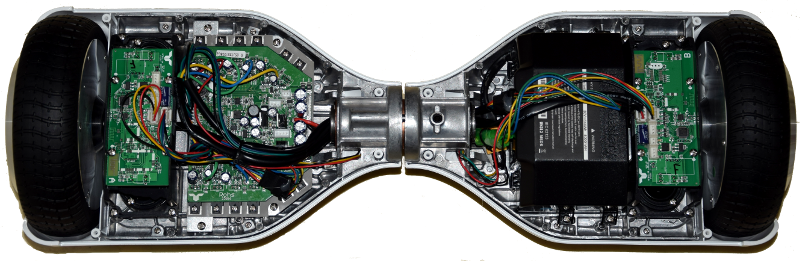
Lite seriös utforskning av alternativen visar att en hoverboard innehåller precis allt man kan önska och en sådan går att köpa för 1200-2000 kr ny eller 500-1000 kr begagnad. Så detta är vad jag nu gör.
Kolla här; Man får 2 robusta hjul av seriös kvalite med inbyggda bortslösa motorer, starka nog att köra omkring på 100 kilo i upp och nerförsbackar i rätt så okej hastighet. Hjulen är dessutom ljudlösa vilket är tacksamt om roboten åker omkring inomhus. De innehåller inga delar som slits förutom gummit på däcken, vilket betyder att de kommer hålla väldigt länge även vid daglig användning. Förutom dessa 2 ovärderliga kvalitetshjul får du även ett stort batteripaket med lithium -batterier på 36 volt. Allt detta för 1500 kr, det är som hittat.
Hjulen går iofs också att köpa direkt från kina för ca 30 dollar styck om man köper några stycken och ett batteripack lika mycket. Dvs runt 90 dollar när detta skrivs. Men då tillkommer fraktkostnad och moms, vilket summerar till ungefär vad en hoverboard kostar att köpa och slakta.
Montera ner hoverboard
Den är mycket sympatiskt konstruerad och därför lätt att montera ner. Jag började med att skruva bort plastkåpan med stjärnskruvmejsel. Ett första intryck är att hoverboarden är en rätt så avancerad konstruktion trots allt. Den är mycket välgjord rent ingenjörsmässigt. Man kan ju fundera över hur det överhuvudtaget är möjligt att konstruera en sådan här produkt till ett så lågt pris. Men skit i det nu. Det här är ingen ekonomiblogg utan en sajt om elektronik-mekande och här skruvar vi sönder saker om det behövs för vårt projekt.
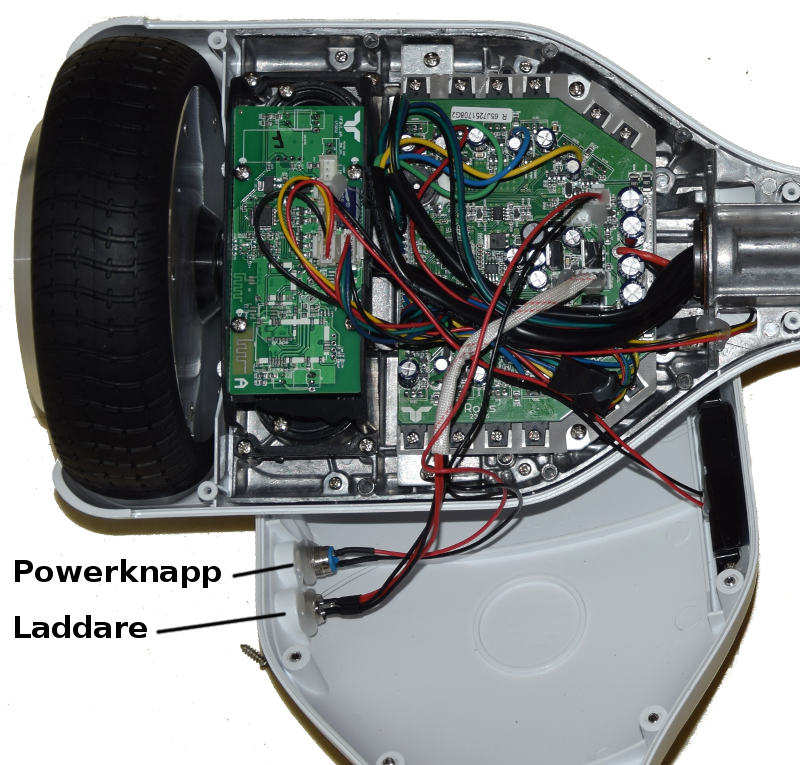
Jag skruvade bort plastkåpan till höger, det var lätt gjort. I plastkåpan sitter även en lampa (lysdioder på ett litet kretskort) så en sladd dit hänger med. På denna sida satt tydligen lithium-batteriet.
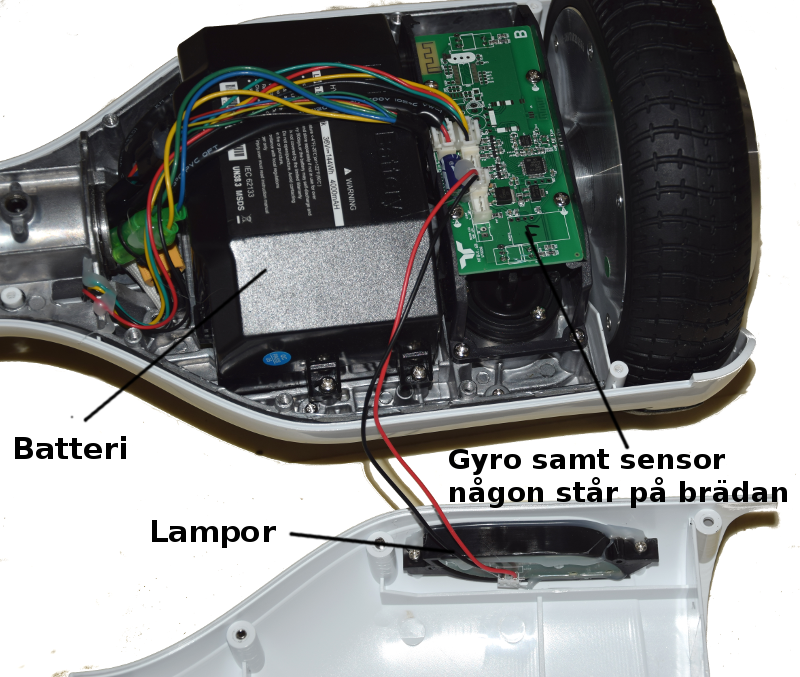
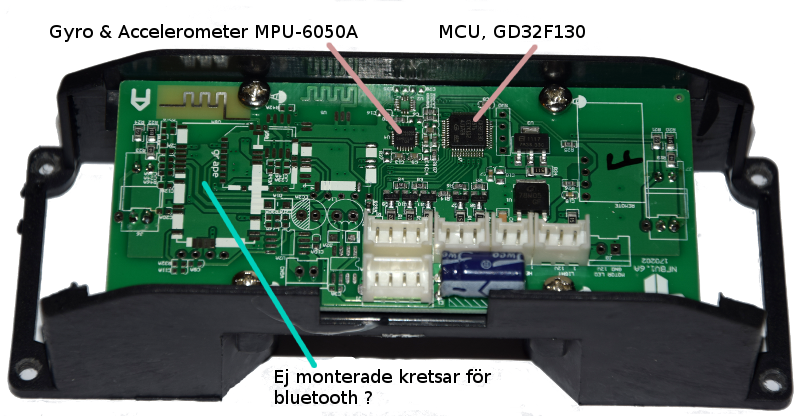
Skruvade bort på andra sidan också. Där satt tydligen moderkortet. På båda sidor sitter ett kretskort med gyron samt ombord-sensorer för att kontrollera att någon står på hoverboarden. Kretskorten är förberedda för bluetooth sändare/mottagare till någonting. Det verkar allmänt som dessa kretskort innehåller funktioner som delvis inte används eller kanske används på vissa modeller. Det sitter en GD32F130 -MCU på dem (48 Mhz). Gyrot är en MPU-6050A, dvs en Triple Axis Accelerometer & Gyro om man ska vara petnoga.
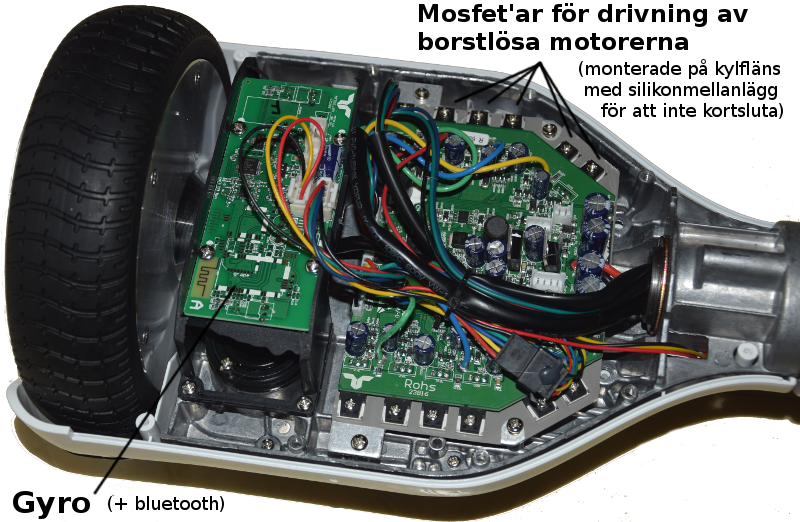
In och ut ur moderkortet går de flesta sladdar i hoverboarden. Hälften av elektroniken på moderkortet är drivkretsar (effektsteg) för de borstlösa motorerna. Man känner lätt igen konstruktionen med 6 stycken transistorer på kylflänsen för vardera borstlös motor. Andra halvan av moderkortet är en mikrokontroller (GD32F103, 108 Mhz klockfrekvens, 3MB flash) för att styra hoverboarden. Mikrokontrollern läser gyron, accelerometer och hallgivare och några kontrolldata (att någon står på hoverboarden t.ex.) och styr sedan motorerna med lämpliga algoritmer och med hjälp av nämnda drivtransistorer.
Finns även några pinnar på moderkortet för SWD -programmering ifall detta är intressant. Mer om detta hittar du här.

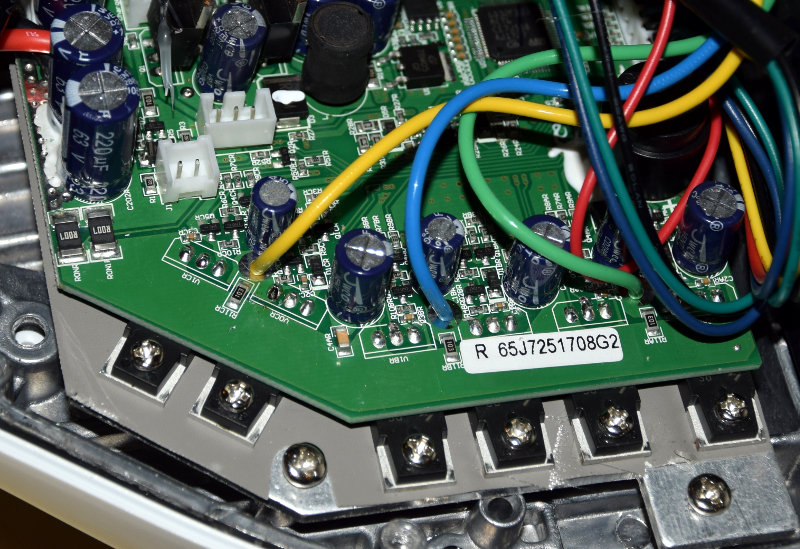
På bilden nedan en närmare titt på ett slutsteg för den ena motorn. Gul, blå och grön kabel går ut till motorn. Studera en bortlös motor i simulatorn. De 3 kablarna till motorn hanterar de 3 kopparlindningarna i motorn.
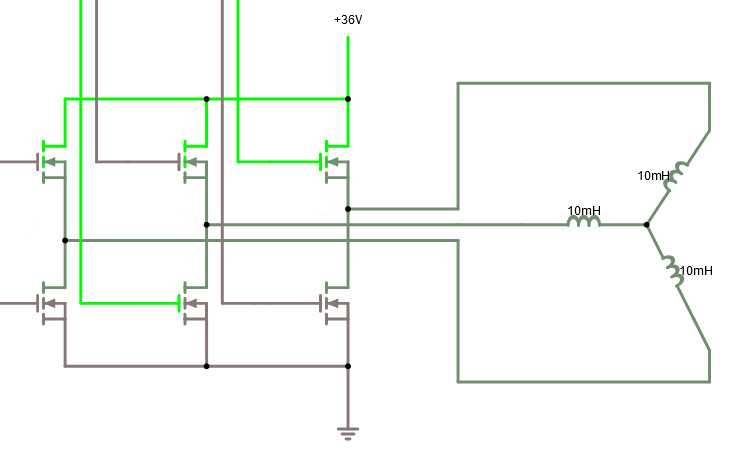
Notera de 6 stycken effekttransistorerna nedan, monterade mot en kylfläns som ligger under kretskortet.
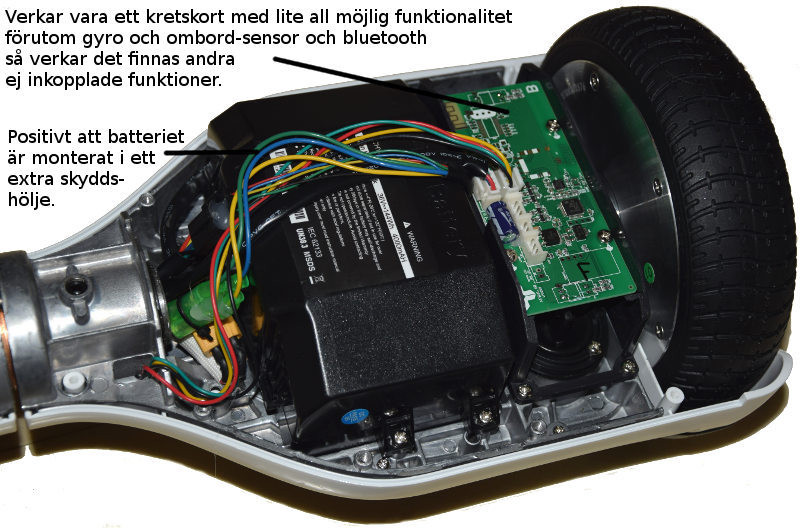
Monterar vi ur lithium -batteriet ser det ut som nedan. En svart låda och en sladd med en XT60-kontakt. Hur man kan ladda detta lithiumbatteri har vi här.

Monterar vi upp batteriets plastlåda ser det ut så här.

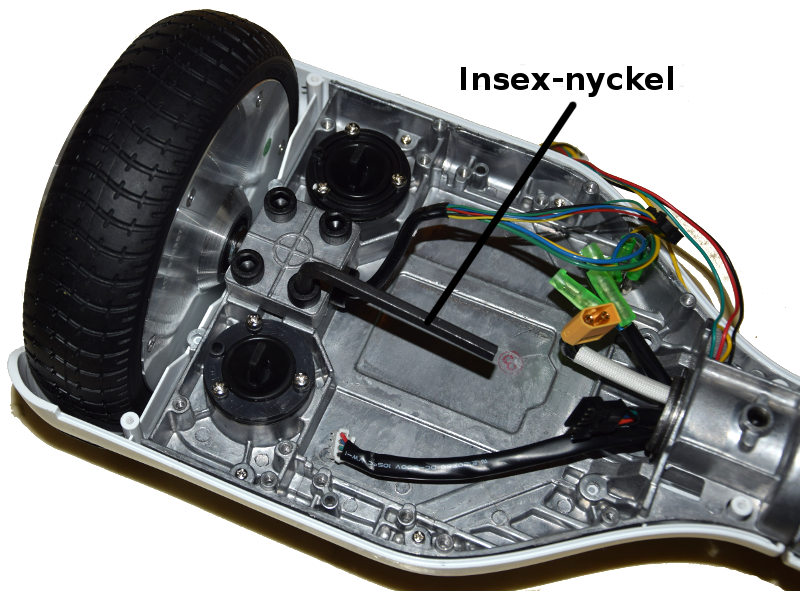
Har man skruvat bort batteriet går det att komma åt 4 insex-skruvar som behövs skruvas bort för att lossa på hjulen. Man lossar på en skruv genom att skruva moturs (tvärs emot klockans rörelse).
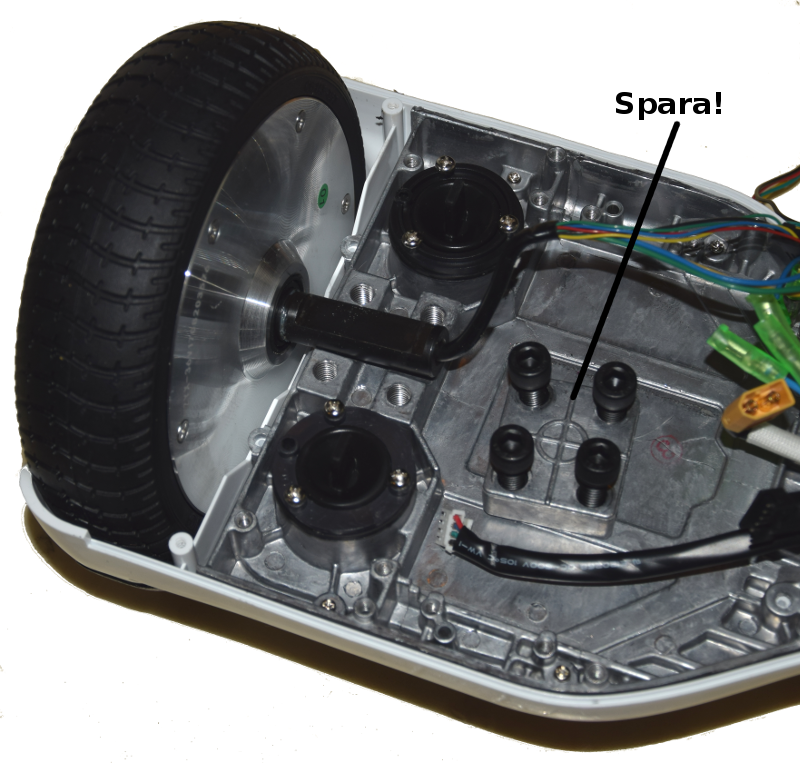
Den lilla klossen kan vara bra att spara när hjulen sedan på något sätt skall monteras på den egna roboten eller vad hjulen nu skall användas till.
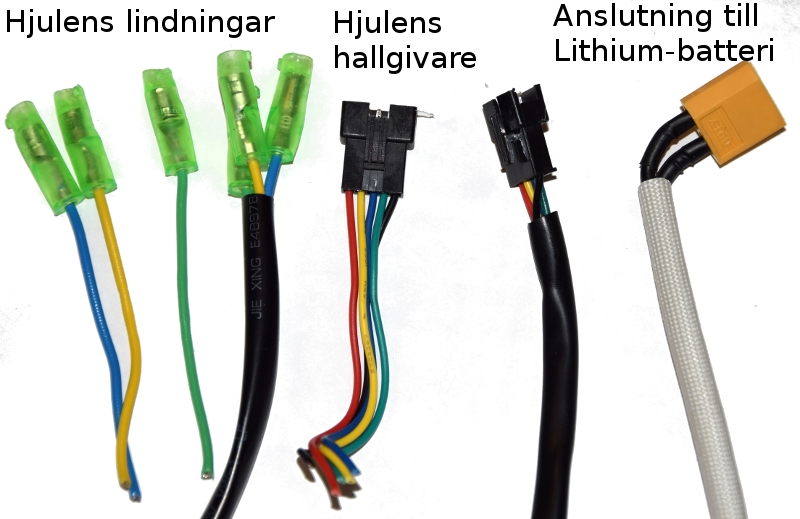
Så har vi äntligen fått bort vårt hjul. Anslutningar är dels 3 tjocka kablar (gul, blå, grön) till motorns kopparlindningar, det som driver motorn. Sen finns även en återkoppling från hallgivaren. Av de 5 sladdarna är 2 stycken ström (röd, svart) och 3 stycken signaler (gul, blå, grön). Läs om hur vi får liv i dessa hjul med egen elektronik för att driva borstlösa motorer.

Slutligen är det väldigt intressant spara på vissa kablar för att ansluta hjulmotorer, hallgivare och även batteriet (XT60-kontakt).

En kylfläns...