Så fungerar en borstlös motor
Allmänt
En vanlig dc-motor har en mekanisk kommutator, det är där "borsten" sitter i "borst-motorn". Men även en AC-motor kan ha borst. Se nedan bild. En mekanisk kommutator.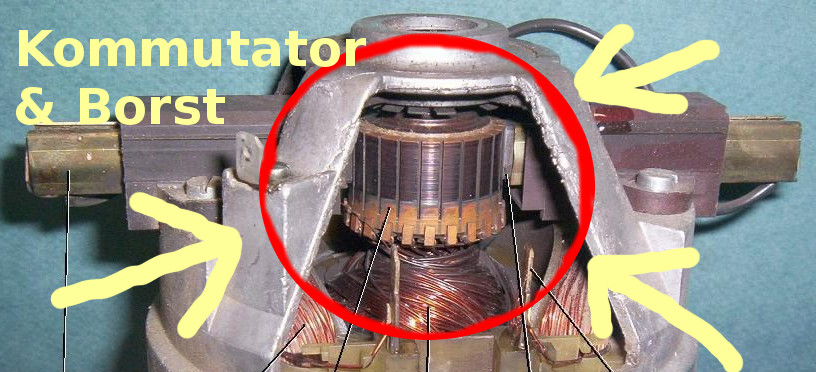
En borstlös motor saknar borst. Kommutatorn i en bortstlös motor är ersatt med sensorer och elektronik. T.ex. en hallsensor (eller flera stycken) som känner av av motorns läge.

Man kan också formulera det som att en borstlös motor är elektroniskt kommuterad. Därför säger man ibland EC motor, där EC är står för Electronically Commutated. Ibland kallas det också BLDC, dvs BrushLess DC -motor.
Egenskaper och konstruktion
Borstlösa motorer hittar man numera lite överallt. De är både starka och billiga att bygga, de är dessutom tysta och har obefintligt med delar som slits. Hur man konkret bygger styrelektronik för bortstlös motor på annan sida. Nedan ett hjul från en hoverboard med integrerad borstlös motor.
Nästan alla borstlösa dc-motorer består av 3 koppartråds-lindningar. De kan sedan vara ihopkopplade i en stjärnkoppling eller delta-koppling. Jag kommer enbart bry mig om stjärnkoppling.

Nedan visar lite mer konkret hur det ser ut. Genom att driva en ström genom 2 av dessa 3 trådar och låta den tredje hänga fritt i luften kan vi alltså skapa en elektromagnet med magnetiska poler där vi önskar dem.
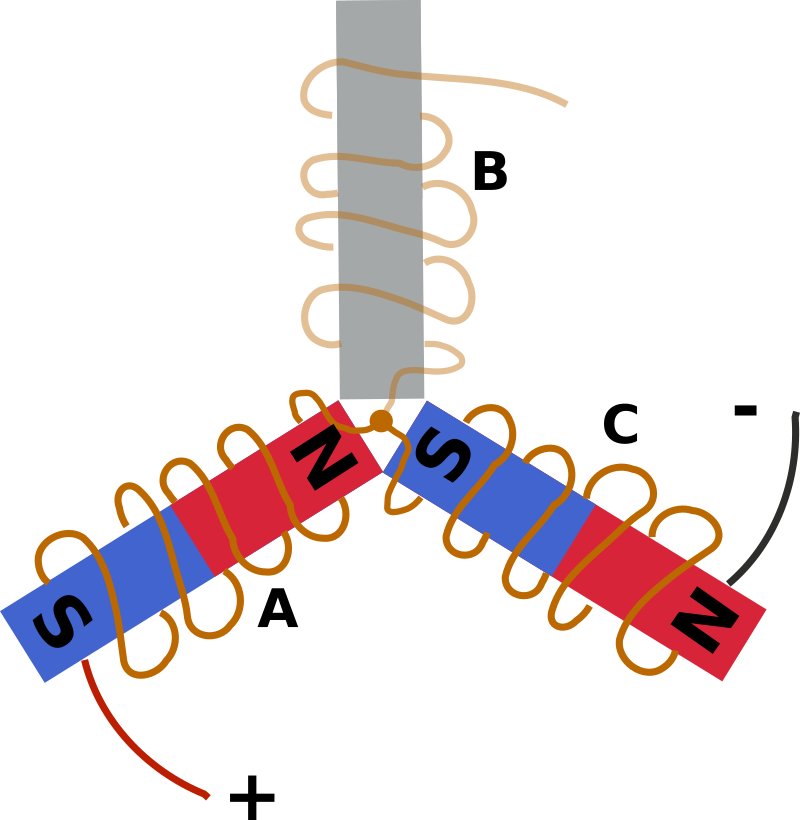
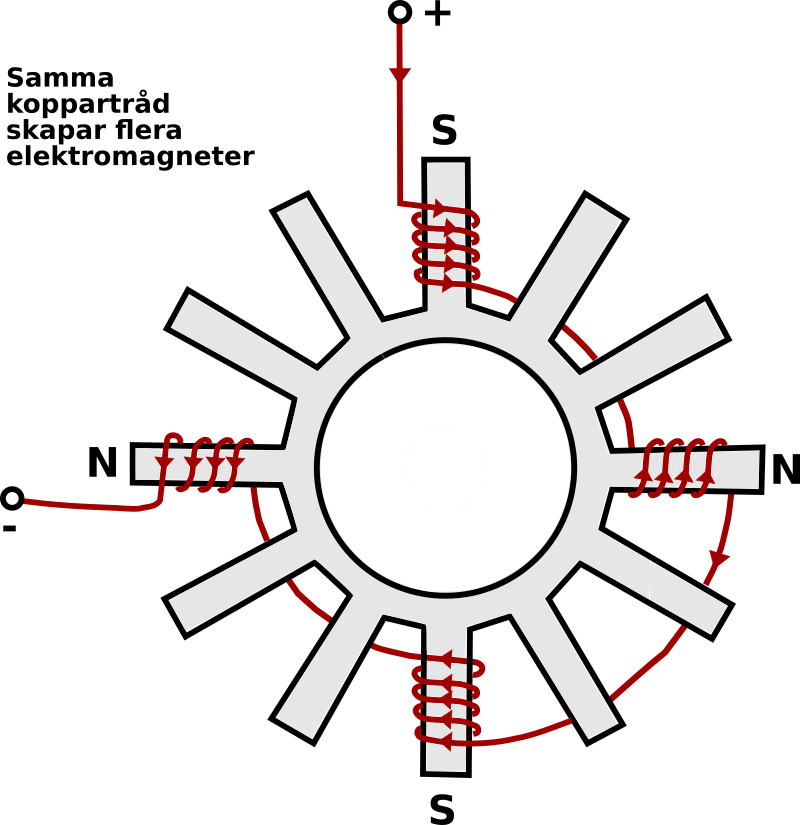
Om det finns 6, 9, 12, 15 eller 18 elektromagneter så är detta oftast bara multipler - alltså parallell/serie -koppling - av fler sådana här trippler med magneter enligt nedan uppkoppling. Det finns många olika sätt att linda dessa motorer samt många olika varianter på antal elektromagneter och permanentmagneter.
Dessa 3 elektromagneter är lindade så att man genom att ansluta 2 av kablarna och låta den 3:e "hänga fritt" kan skapa elektromagneter enligt nedan. Det finns då 3 olika magneter som kan skapas och genom att vända på polariteten kan man få 6 olika konfigurationer.
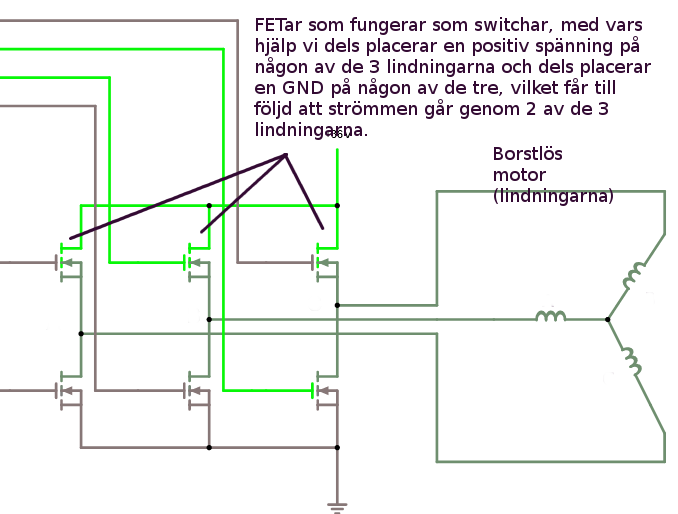
Rent elektriskt kan man styra strömmen i dessa elektromagneter med 6 stycken switchar, t.ex. 6 stycken IGBTs eller power-mosfet eller något annat som jobbar som switchar, alltså med 2 lägen till eller från.
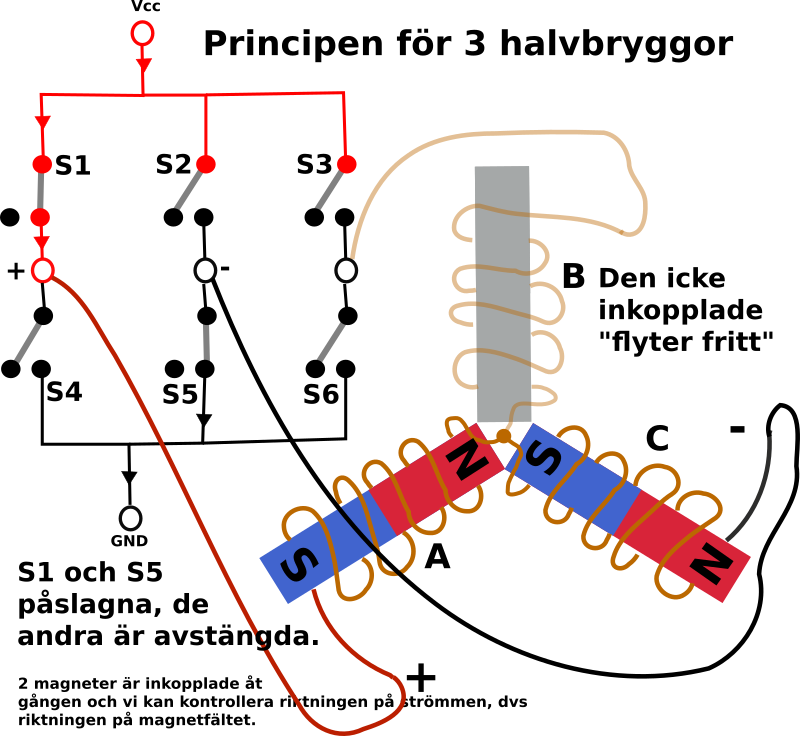
Konstruktionen tillåter oss att fritt placera en positiv spänning någon av de 3 lindningarna och fritt sätta en GND (minus) på någon av de 3 lindningarna, dvs fritt aktivera 2 av de 3 elektromagneterna i någon magnetisk riktning. I ovan bild är S1 och S5 tillslagna och de andra bortkopplade, detta ger att elektromagnet A och C är magnetiserade. Konstruktionen innebär rent allmänt att vi fritt kan styra strömmen och dess riktning genom 2 av de 3 lindningarna efter önskan.
En skiss i simulatorn visar att se hur dessa 3 lindningar arbetar.
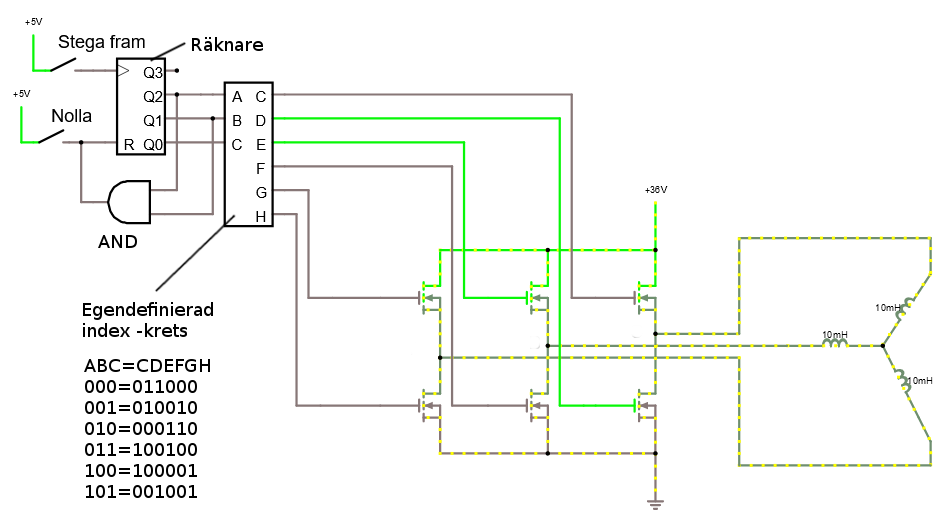
Öppna i simulatorn och klicka på switchen stega fram för att stega framåt.
Kommutator
Så vad är då rätt tillfälle att slå till och från de olika elektromagneterna? I en vanlig dc-motor finns en mekanisk kommutator som i en given rotationsvinkel sätter strömmen i rätt lindning. I den borstlösa motorn låter vi elektronik sköta kommuteringen.Det finns huvudsakligen 2 sätt kommutera en borstlös motor. Antingen med sensorer av typen hall-sensor (sensor som reagerar på magnetfält) som sitter i motorn eller en indirekt sensor som "känner" var motorn befinner sig genom att detektera motorns EMF -strömmar.
Med någon av dessa 2 metoder erhåller vi alltså motorns läge, vilket kan vara 1 av 6 olika positioner. Och beroende på läge elektrifierar vi sedan elektromagneterna som önskvärt för att uppnås rotation.
Utan hall-sensorer
De flesta borstlösa motorer i hobbybutiken, t.ex. borstlösa motorer till radiostyrda flygplan eller bilar eller drönare, saknar hall-sensorer. Motorerna har bara 3 stycken tjocka anslutningskablar. Tittar man i samma butik på olika drivpaket för dessa motorer saknar de även ingång för hallsensorer. Bara 3 anslutningar till motorn, 2 stycken till batteriet och 3 stycken för servosignalen. Hur fungerar detta?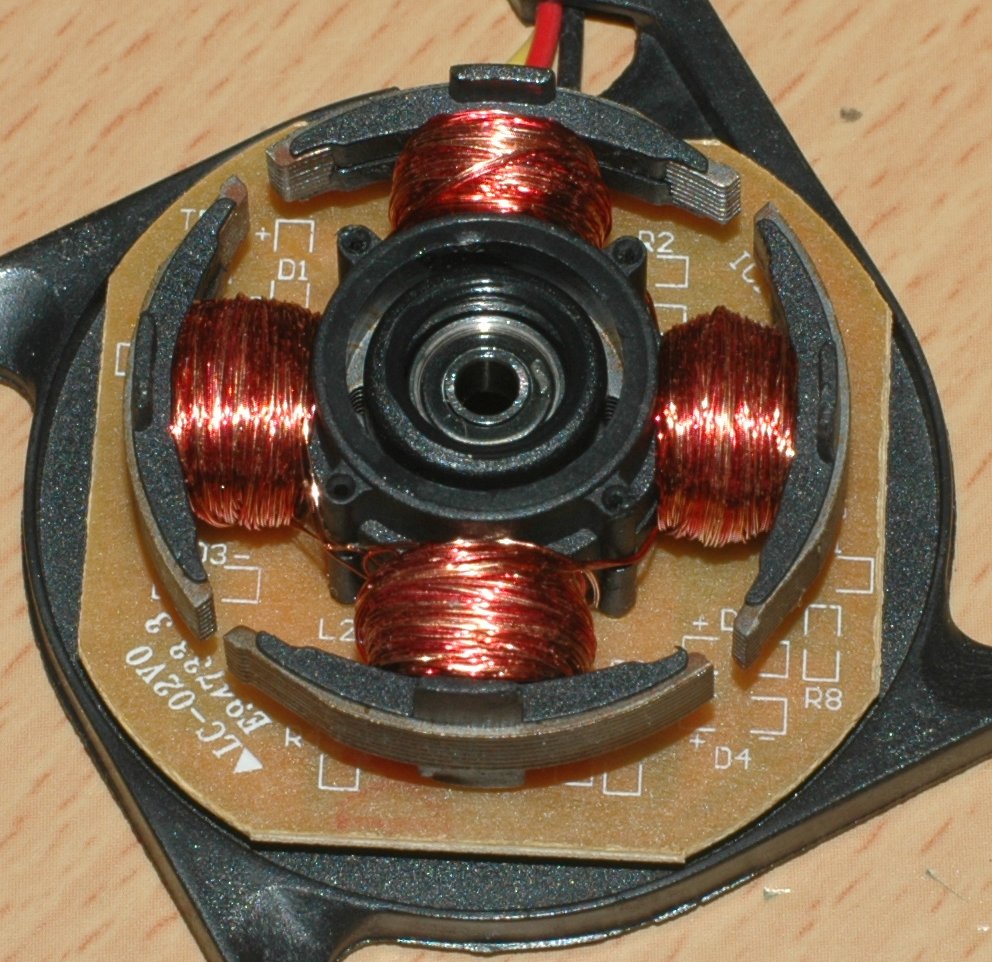
Del av borstlös motor utan hallsensorer.
Svaret är att; det behövs ingen hall-sensor för att "kommutera" en borstlös motor. Vad denna drivelektronik gör är att istället detektera de motverkande EMF -strömmar (kallas även CEMF eller BEMF (counter/back -electromotive force)) som uppkommer när den bortstlösa motorn snurrar. Det fungerar extremt kort förklarat som så att om man i ett givet ögonblick elektrifierar 2 av motorns 3 lindingar, då kan den 3:e - som en kort stund är frikopplad elektriskt - användas som sensor i detta ögonblick. Det är nämligen så att en BLDC -motor är i princip en generator, som kommer generera ström när den roterar. Dessa EMF -strömmar används sedan som trigger för att avgöra hur lindningarna i motorn skall elektrifieras. Detta fungerar utmärkt för en bortlös motor vars uppgift är att snurra med hög hastighet, t.ex. en propeller i ett flygplan eller en drönare. Problemet här är att motorn redan måste snurra för att dessa strömmar skall kunna detekteras. Startögonblicket blir därför lite ryckigt. När motorn väl snurrar fungerar all styrlogik perfekt och motorn är stark. En "svag" start är i praktiken inget problem för t.ex. en propeller som alltid kommer snurra rätt så fort men för en hoverboard eller elektrisk cykel, då vill man ha maximalt vridmoment från start och därför behövs hall -sensorer eller liknande i motorn som kan styra kommuteringen.
Nedan är ett tänkbart kretsschema för att detektera dessa EMF -strömmar.
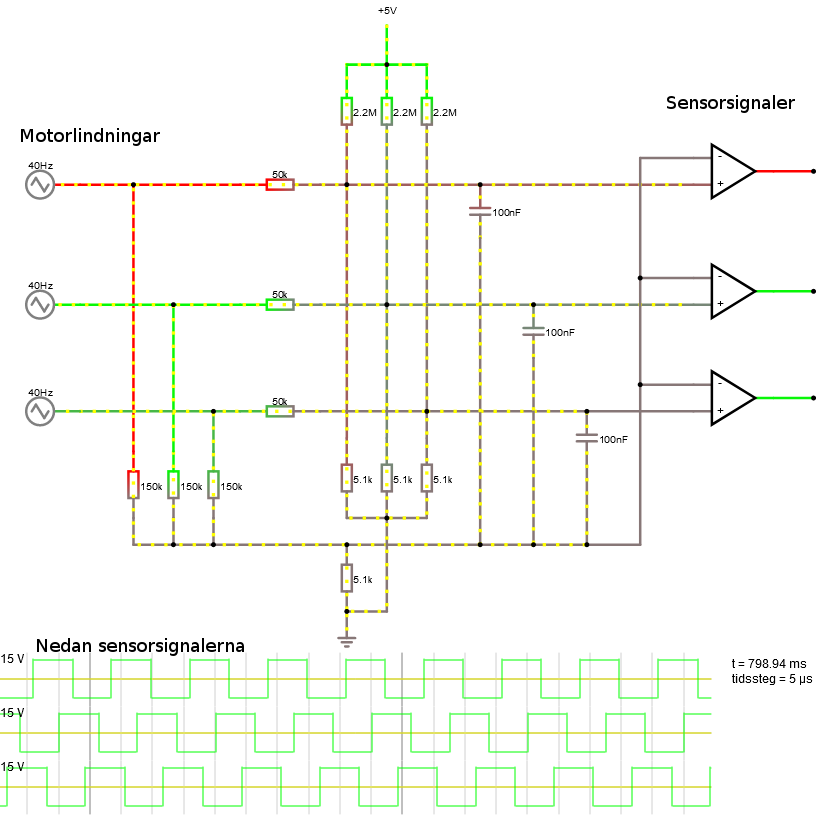
Detektera EMF-strömmar i simulatorn.
OBS att detta är en väldigt enkel billig lösning. Att styra en bortlös motor genom att mäta strömmar kan bli väldigt komplicerat, det är nästan en hel vetenskap i sig själv.
Hall-sensorer
En motor utrustad med Hall-sensorer känner av (vet) motorns läge redan när motorn står stilla. Detta betyder att styrelektroniken alltid vet motorns läge och redan från stillastående (o varv/minut) kan elektrifiera exakt rätt lindningar i motorn. Detta betyder alltså maximalt vridmoment redan från det att motorn står stilla. Detta är en helt onödig egenskap om du skall driva en propeller men en helt central egenskap om motorn sitter i en hoverboard där motorn snabbt och med maximal styrka måste kunna driva fram eller bak redan vid liten rörelse.Sensor eller inte sensor
Svaret på frågan om sensor behövs eller inte hänger alltså på frågan om max vridmoment behövs från stillastående (t.ex. en hoverboard, segway, m.fl. eller en bil som skall ha hög acceleration eller lastbil eller tåg som behöver högt vridmoment från start) eller inte (propeller).Mer ...
Studera hur hoverboardens bldc motor fungerar.Praktisk styrelektronik för bortstlös motor.