Hoverboardens hjul/motor
Du kanske bör titta lite på en hur borstlös motor fungerar för att förstå denna sida.Utsidan
Ur hjulet går 3 tjocka kablar och 5 tunna.
Insidan
Så det ser alltså så här ut på insidan. 27 poler, dvs 27 stycken elektromagneter och 30 stycken permanentmagneter. Istället för en tjock koppartråd är denna motor virad med 5 stycken parallellkopplade tunnare koppartrådar.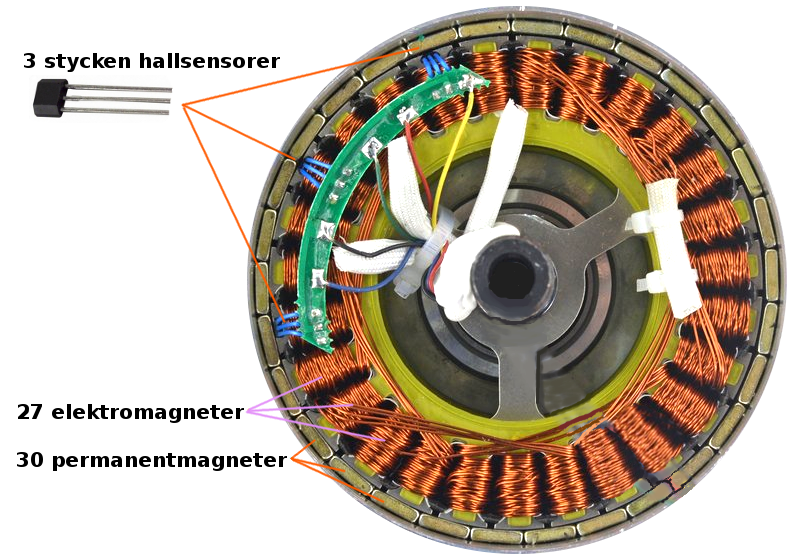
Hjulets position läses av med 3 stycken hallgivare som reagerar på magnetisk nordpol.
Hoverboard hjulets kopparlindningar
Koncept för lindningarna
Jag har försökt komma fram till hur hoverboardhjulet är lindat och det verkar följa konceptet AaABbBCcC, där stor bokstav är ena hållet och liten bokstav andra hållet på kopparlindningen.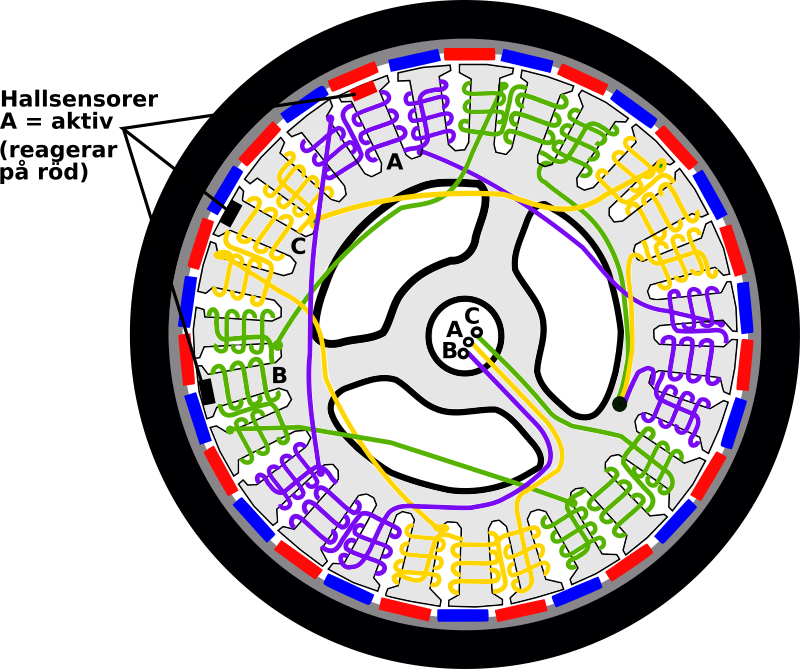
Högerhandsreglen
Nedan högerhandsregel kanske kommer väl till pass här. Bara som påminnelse. Högerhanden. Låt fingrarna följa med strömmen runt en lindning. Tummen pekar då mot magnetfältets norra sida här färgat rött. Den andra sidan blir då blå. Olika färg attraherar och lika färg stöter ifrån varandra.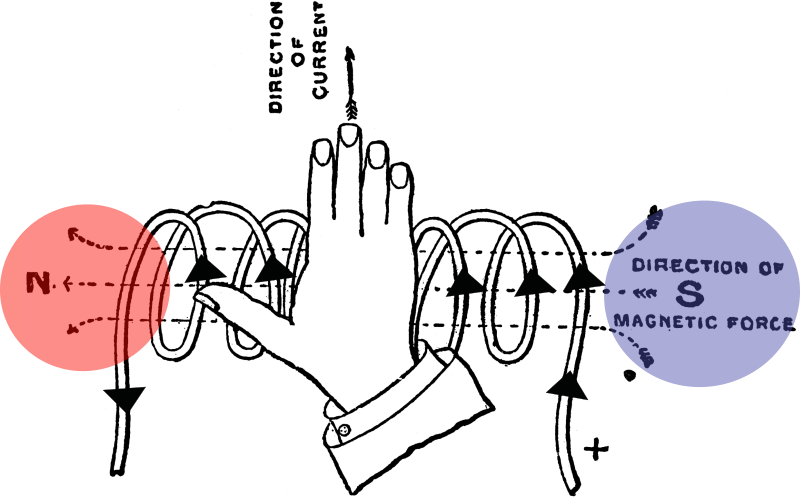
Driva runt hoverboard hjulet
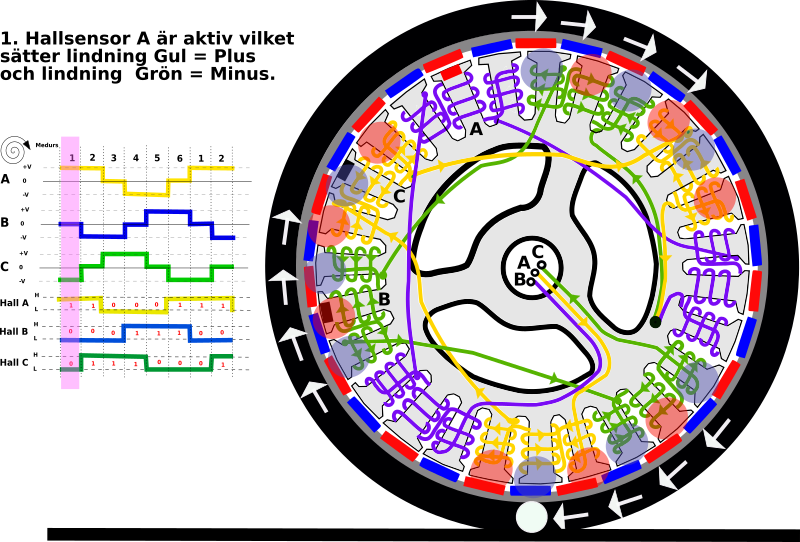
För att driva runt hjulet läser vi alltså signalen från hallgivarna - vilket blir en kod på 3 bitar - och beroende på denna kod så driver vi sedan en ström i någon riktning genom 2 av de 3 anslutningarna till kopparlindningarna. Det är alltså 18 elektromagneter som är aktiva i varje fas. En hel sekvens på 6 steg blir som nedan.OBS. För att förstå bilderna nedan måste du förstå att motorns mitt med elektromagneter är fixerad och det är ytterringen, det svarta, tillsammans med magneter som snurrar.
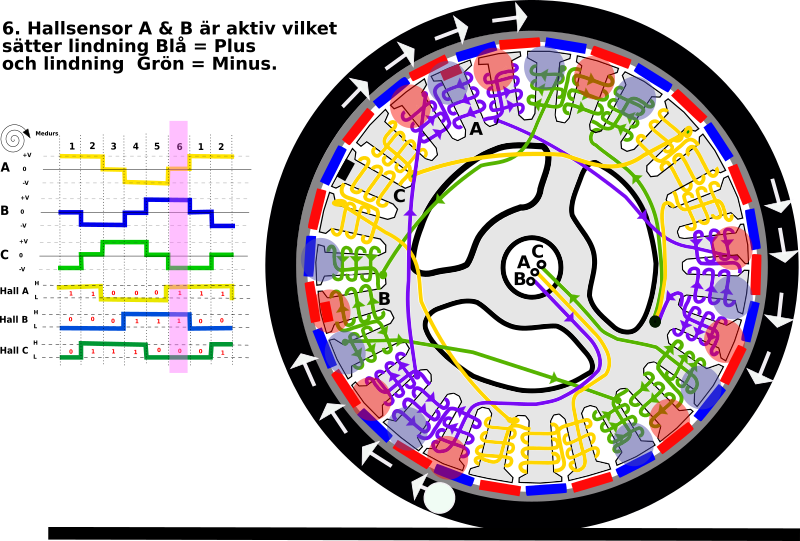
Thats it. Tog lite tid göra bilderna, men jag tycker det blev glasklart nu.
Fas 1. Hallsensor A ger signal, dvs ABC = 100. Elektromagnet A plus och elektromagnet C minus. B flyter fritt, dvs är inte ansluten.
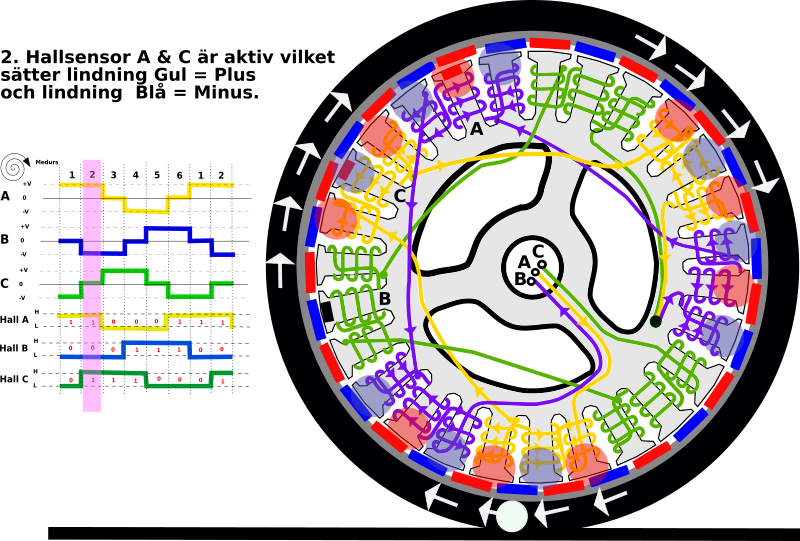
Fas 2. Hallsensor A och C ger signaler, dvs ABC = 101. Elektromagnet A plus och elektromagnet B minus. C flyter fritt, dvs är inte ansluten.
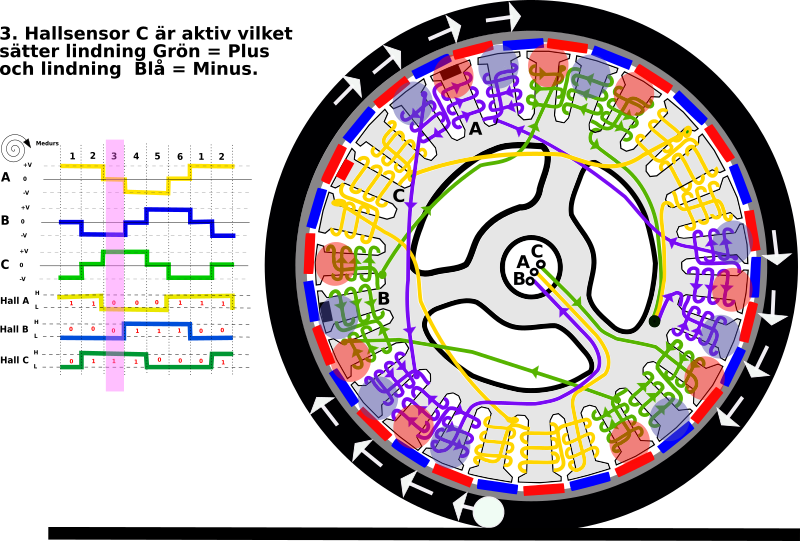
Fas 3. Hallsensor C ger signal, dvs ABC = 001. Elektromagnet C plus och elektromagnet B minus. A flyter fritt, dvs är inte ansluten.
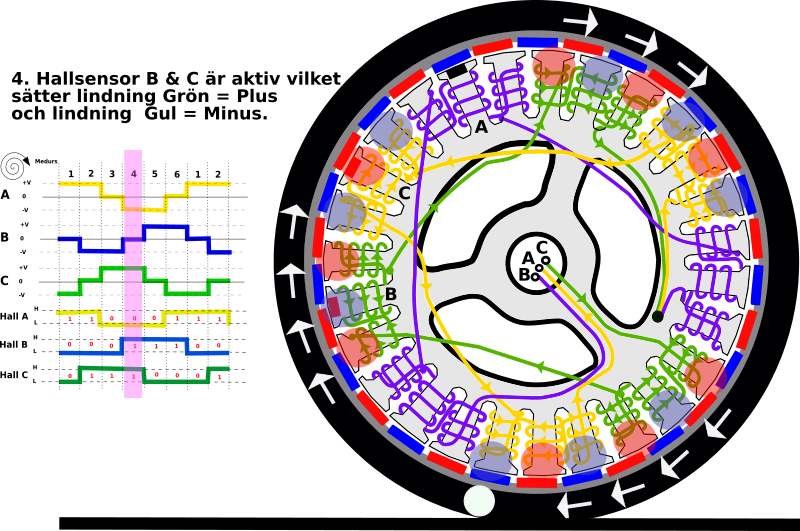
Fas 4. Hallsensor B och C ger signal, dvs ABC = 011. Elektromagnet C plus och elektromagnet A minus. B flyter fritt, dvs är inte ansluten.
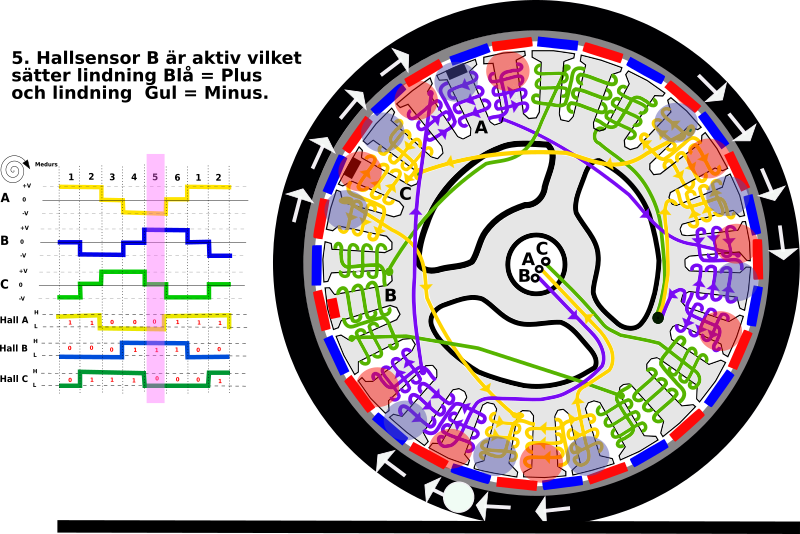
Fas 5. Hallsensor B ger signal, dvs ABC = 010. Elektromagnet B plus och elektromagnet A minus. C flyter fritt, dvs är inte ansluten.
Fas 6. Hallsensor A och B ger signal, dvs ABC = 110. Elektromagnet B plus och elektromagnet C minus. A flyter fritt, dvs är inte ansluten.
Kommuteringstabell
Man kan tänka sig en tabell där vi komponerar ett binärt tal av hallsensorernas utgångar och beroende på hallsensorernas värde så slår vi upp vilka kopparlindningar som skall elektrifieras.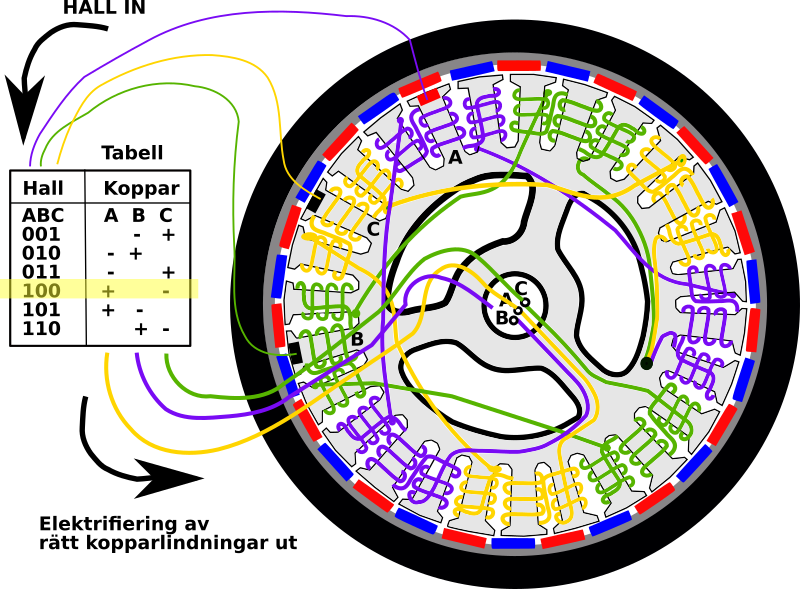
Resten är elektronik. Elektronik för att driva hoverboardens hjul.