Lite om hobbyservon
Exempel på styrning av servo
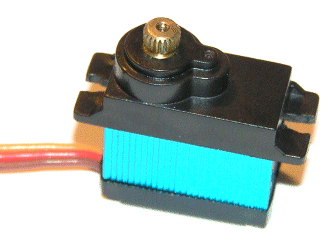
Konkret exempel på hur man styr ett servo hittar du här eller om du vill ansluta servo till motorshield. Nedan följer lite allt möjligt, mer eller mindre sorterat, utom just detta.Ett servo
Motorstyrd rörelse
Har man lekt med tanken lite att bygga någon slags robot, så kommer man snabbt i kontakt med hobbyservon. Det finns flera olika varianter av hobbyservon med olika prestanda och användningsområden. Hobbyservot som koncept har funnits väldigt länge och har sitt ursprung i den radiostyrda hobbyvärlden. Där används det fortfarande men har nu även letat sig in i robotvärlden.Styrsignal
Servon styrs rent praktiskt med en pulsbreddsmodulerad signal där längden på pulsen avgör vilken vinkel servot skall stå i. Kontrollsignalen går genom lite elektronik i servot för att uppnå denna funktion. Motorn är alltså inte direkt inkopplad på kontrollsignalen. Hur denna elektronik ser ut beror på om det är ett digitalt eller analogt servo. Det är inget man behöver bry sig om. Skillnaden mellan dessa handlar utåt om prestanda för en användare. Lite om analoga och digitala servon längre ner.
Observera att dessa pulsbredder är lite ungefärliga. En viss servomodell kan ha sitt minimum kring 0.3 mS och andra 0.5 mS. Vissa har sitt max på 2.3 mS och andra 2.5 mS. Detta är något man exprimentiellt får ta fram för en viss servomodell.
Tittar man på tekniska prestanda får man viss vägledning ibland. Här är ett servo med mittenläge 1.5 mS (ser de ut som). Spänning 4.8 volt. Det rör sig 60 grader snabbare än en tiondels sekund (olastad) och har ett vridmoment på 0.6 kg*cm.
Intern funktion
Servokonceptet handlar om att låta en motor snurra åt något håll och samtidigt lyssna på mätdata från en givare som ger återkoppling av positionen. När önskvärd position är uppnådd - då stannar man motorn där. Grovt skissat är det så det fungerar. Vi litar alltså inte på motorn (motorn i ett typiskt servo är oftast en ganska primitiv dc-motor) men vi litar på lägesgivaren. Det är lägesgivaren som får tala om ifall servot står i rätt läge.Ett återkopplat system innebär alltså att man mäter och återkopplar resultatet, i detta fall via en positionssensor, för att kunna finjustera läget. Öppna och återkopplade system benämns ibland open loop och closed loop.
Studera ovanstående skiss. Vi skickar in ett börvärde (önskvärd position) i en komparator ("jämförare") som låter skillnaden mellan BÖR och ÄR värde ligga till grund för hur motorn skall justeras. Dvs, räknar ut FELET=ÄR-BÖR och sedan snurrar vi motorn åt vänster om FELET är positivt och åt höger om FELET är negativt. Regulatorn justerar då motorn så att skillnaden mellan ÄR och BÖR minimeras. Återkopplade system kan snabbt bli ganska komplicerade reglersystem där styrningen sker både med en linjär faktor, en deriverande och integrerade (PID -regulator)

Exakt hur regulatorn är implementerad varierar antagligen rätt stort men principen är densamma. Det svåraste nöten med alla reglersystem är att snabbt komma till det läge man önskar. Snabba system tenderar att skapa överslängar.
Analoga servon
Det är lite halvsvårt hitta en bra ingående förklaring hur ett analogt servo fungerar elektroniskt. Men jag tror mig eventuellt veta det ändå eftersom jag för länge läst om detta. Nedan följer en skiss direkt ur minnet. Har jag fel får du gärna rätta mig.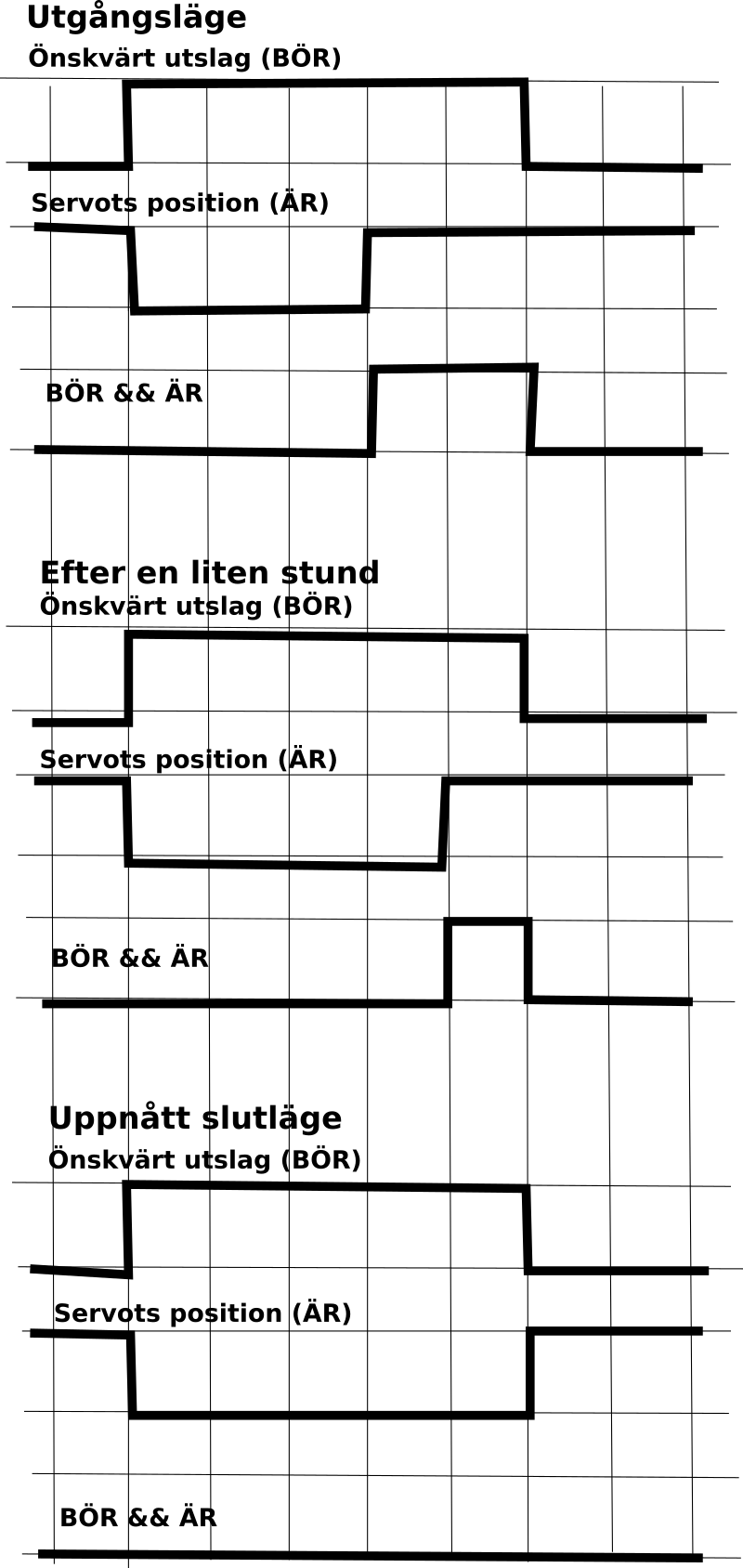
Det analoga servot är internt en ren analog konstruktion, relativt okomplicerad i termer av elektroniska komponenter men inte desto mindre genial. Mekaniskt ser ett analogt servo likadant ut som ett digitalt med en motor och potentiometer och lite kugghjul. Potentiometern (givaren, är-värdet) i det analoga servot är kopplat till en timer-krets som genererar en pulsbreddsmodulerad signal 50 ggr per sekund, precis som styrsignalen är definierad. Hur breda dessa pulser är beror på vad potentiometern i det analoga servot står. Vad man sedan gör, i det analoga servot, är att jämföra styrsignalen (börvärdet) och den internt genererade signalen (är-värdet vilket ges av potentiometerns läge). Det kan göras enkelt med någon lite jämförare som gör motsvarande en logisk OCH -grind. Det man får är sen den puls som når motorn 50 ggr per sekund.
En konsekvens av denna konstruktion - och det som sedan resulterar i den stora skillnaden mellan analoga och digitala servon i prestanda - är att pulserna i det analoga servot blir kortare och kortare (svagare) ju närmare slutpositionen man kommer. Det betyder att det analoga servot är mycket svagt när man ska göra små fina justeringar och ganska svagt på att hålla en position om lasten är tung (vilket iofs går att kompensera genom ett mycket starkt analogt servo). Däremot torde det inte vara så stor skillnad vid stora utslag.
Digitala servon
Digitala servot huserar en mikroprocessor och det ger helt andra möjligheter att driva motorn. Genom att själva regulatorn som jämför önskat utslag (börvärdet) med faktiskt utslag (ärvärdet) flyttat in i processorn kan man sedan fritt bestämma hur motorn skall drivas för att uppnå önskad position. Vad man gjort är t.ex. att höja frekvensen lite till 300 Hz för att få bättre verkningsgrad.
Dessutom låter man processorn köra motorn med lite högre kraft så nära slutpositionen (börvärdet) som det bara är möjligt (det går inte att köra med full kraft riktigt hela vägen, pga risk för översläng/självsvängning osv). Detta leder till starkare och mer exakt servo som dessutom är bättre på att hålla positionen och bättre på små utslag.
Eftersom motorn går oftare och med högre kraft i det digitala servot så drar det också mer ström. Digitala servon låter också lite (eller mycket beroende lite på) mer än analoga p.g.a. detta.
Anslutningskabel
Ur servot går 3 kablar. Det finns lite olika varianter på temat eftersom alla tillverkare vill göra på sitt egna sätt. Har man tur finns där en svart (minus) och röd (plus), det är isåfall spänning och 5 volt borde fungera. Den som blir över (vit, orange, gul eller svart) är styrsignal. Ifall det finns 2 svarta är den svarta i mitten minus och den andra svarta styrsignal. Styrsignalen är som tidigare nämnt en pulsbreddsmodulerad signal.
Olika konstruktioner
Det finns servon med plastkuggar och metallkuggar eller både ock. Metallkuggar är såklart betydligt mer hållbara än plastkuggar. Dock är ofta glappet i servon med metallkuggar större än dito med plastkuggar. Förutom obefintligt glapp i plastkuggs-konstruktioner är också servon med plastkugghjul ofta tystare än dito med metallkugghjul. Vanligaste plastkuggen är troligtvis nylon. Dyrare metallkuggar brukar vara av titanium eftersom det är lättare (lägre densitet) än järn eller mässing eller något annat.På utgående axel sitter ibland ett eller två stycken kullager.
Olika motorer
Även motorn kan variera. Det vanligaste är en helt vanlig likspännings-motor. Det är en billig och beprövad motor som dock lider av problemet att rotorn är tung och därför har den klassiska DC-motorn inte en blixtsnabb acceleration. Inget man märker till vardags men önskar man servon med mycket snabba rörelser (snabb respons) så har man istället utvecklat det som kallas coreless motor, dvs en "kärnlös" motor - utan kärna. Dvs, rotorn är inte längre tung utan ganska lätt. I övrigt är konstruktionen med t.ex. kommutator samma som för DC -motorn. Men accelerationen på en coreless motor är mycket hög.Sedan förekommer även borstlösa motorer. Bortslösa motorer har, istället för en kommutator, elektronik som styr elektromagneternas till/frånslag. Runt dessa fixa elektromagneter snurrar sedan en magnetisk cylinder. Mindre delar som slits ger därför den bortslösa motorn överlägsen livslängd. Den har också - allt annat samma - lägre strömförbrukning, högre vridmoment, den är också tystare.
Tillbehör
I samma butiker som säljer hobbyservon hittar man många användbara tillbehör. Dessa är ofta anpassade för flygplan, helikoptrar eller bilar men de fungerar också utmärkt till ett robotbygge eller vad som helst.
Länkarmarna sitter på servot. Det finns mängder med varianter inkl. både hjul och kugghjul. På denna länkarm kan t.ex. stötstångsanslutning eller en kullink monteras, i vilket sedan antingen en stötstång eller gängad stång monteras. Stötstänger är vanligtvis pianotråd som går att forma som du önskar. En styrarm kan t.ex. monteras på en axel som skall vridas. Styrarmen kan kopplas ihop med ett servo via en stötstång. Detta är bara exempel. Det finns ett hav med detaljer att grotta i.
Servotestare
Ett ovärderligt tillbehör om man mekar med servon är en s.k. servotestare. Den kostar några tior. I den kan man plugga in ett servo och sedan kan man snurra servot fram och tillbaka med ratten på servotestaren. Man kan på så vis justera den mekaniska konstruktionen innan man pluggar in datorn.
Hobbyservo isärmonterat
Skruvar man av locket ser man att det mycket riktigt är metallkugghjul (vilket det skall vara) men inte till 100%. De tre kuggarna närmast dc-motorn är faktiskt plast. Det är inte nödvändigtvis något problem eftersom det moment dessa första kugghjul skall arbeta med är ganska lågt.
Vänder man på det ser man dc-motorn underifrån. Styrelektroniken är insvept i något som känns som maskeringstejp man använder när man målar. Man ser också positionssensorn (potentiometern) underifrån.
Sliter man ut grejorna ser man tydligare. Kretskortet har komponenter på båda sidor. På den ena sidan sitter någon form av processor och på den andra sitter några slutstegstransistorer.
Lite delar utplockade. 3 plastkugghjul och 2 metallkugghjul.
En närbild av kretskortet på den sidan där det som liknar en processor sitter.
Något som är värt att studera extra noga är potentiometern. En ovetenskaplig notis efter att ha tagit del av andras erfarenheter är att det är den här rackaren som lägger av först i ett typiskt servo. En potentiometer är en mekanisk konstruktion där en släde glider på ett resistivt matrial. Detta leder till ett fysiskt slitage som såsmåningom gör att potentiometerna lägger av.

Hur länge håller en sådan här potentiometer? Kan man från bilden ovan avgöra vilken typ av potentiometer det är? En typisk potentiometer med kolbana klarar max 100.000 rörelser sen lägger den av. Vissa klarar inte ens 10.000 rörelser. Om potentiometern är en volymkontroll på en förstärkare är detta väldigt lång livslängd. Men i ett digitalt servo kan potentiometern ligga och skava fram och tillbaka många gånger per sekund när den optimerar en position vilket summerar till hundratals rörelser per minut, speciellt i en robot. Det betyder isåfall att servot har en livslängd på några hundra timmar i en robot. Har svårt att avgöra om detta är rimligt eller inte. Men klart är iallafall att potentiometern troligtvis är servots svagaste länk.